
















Dans Star Wars, des mains sont régulièrement coupées… pas étonnant quand on manipule des sabres laser !
A quelle stade en sommes-nous ? La main d’Anakin ou celle de Luke ?
Les vraies prothèses ont une histoire très ancienne et bien particulière. Les égyptiens s’en servaient déjà. A l’époque de la Renaissance, des mains sophistiquées commencent à faire leur apparition. C’est également par le biais des guerres (sécession, 1914-18, 1939-45) que les prothèses vont se développer.
Où en sommes-nous en 2011 ? Les guerres en Afghanistan et en Irak ont relancé la recherche. Voilà des années que les avancées robotiques proposent des prothèses de plus en plus techniques.
Contrairement à l’évolution considérable des prothèses de la jambe, les progrès sont finalement très récents.
Inimaginable il n’y a encore que quelques décennies, aujourd’hui les doigts d’une main artificielle permettent de saisir des objets avec délicatesse.
Un défi
Le défi scientifique est actuellement basé sur les contraintes biomécaniques. Autrement dit, utiliser le système nerveux existant pour pouvoir commander les différentes fonctions de la main artificielle.
La prothèse n’est qu’un des enjeux de la recherche scientifique. La frontière est mince entre prothèse et produit industriel.
C'est le cas de la main Handroïd de l’industriel ITK. Une main qui pourra aussi bien servir de prothèse (par la suite), que de simple outil à distance pour des ouvriers. Actuellement ce n’est qu’un outil commandé par un gant bourré de capteurs.

La main du groupe japonais Squse est un bon exemple de cette frontière floue. Prévue pour un usage de type industriel/artisanal (pour le moment), elle est capable d’avoir une grande délicatesse grâce à des doigts composés en partie d’un système pneumatique. Dans l'avenir, le bras robotisé pourrait également servir pour la médecine. Par exemple comme aide aux chirurgiens ou en opérations à distance.
Parmis les modèles en développement, Squse travaille sur une main qui joue du piano, conçue elle aussi à l'aide de vérins pneumatiques.
Parlons maintenant des prothèses myoélectriques qui représentent l’un des systèmes les plus répandus.
Elles offrent l’avantage d’être articulées et de répondre comme une main humaine. Elles sont basées sur une connexion musculaire. Des capteurs sont placés sur les muscles : une contraction musculaire engendre une très légère tension électrique qui peut être détectée avec des électrodes sous-cutanées. Cette tension est ensuite transformée et amplifiée pour créer une ouverture ou une fermeture de la main.


La main I-Limb de Touch Bionics utilise ce procédé en allant jusqu’à actionner 5 doigts de façon indépendante. Touch Bionics propose plusieurs types de modèles selon les situations et les besoins spécifiques de chaque patient. De plus, elle peut être réparée à la pièce. Si un doigt casse, il est très simplement changeable contrairement à d’autres mains.
La recherche est encourageante. Mais il est temps d’évoquer quelques défauts :
les problèmes de connexions avec le cerveau, l’insensibilité, la fragilité et le coût.
Connexions avec le cerveau :
Il est plus jsute de parler de connexion avec la volonté du patient, et donc, les ordres donnés par le cerveau. Puisque tout mouvement volontaire est l'exécution d'un ordre donné par le cerveau.
Les interfaces cerveau-main sont encore au début de leurs possibilités mais sont prometteuses. Les différents projets n’en sont pas tous au même point. Des équipes travaillent sur la connexion avec des nerfs intactes (comme ceux des côtes), d’autres se servent de nerfs sains de l’avant bras en les reliant à la machine. Tout dépend du type d’amputation et donc des lésions nerveuses. Chaque patient est traité de façon différente. Nous sommes dans une situation de cas par cas. Dans le cas des Skywalker la partie au dessus du coude est intacte. Elle permet donc plus aisément la connexion nerveuse.
Voici un exemple concret de connexions nerveuses.


L'Università Campus Bio-Medico di Roma développe un projet de main articulée combiné à une interface neurale. Cette étude fait partie du projet SmartHand financée par l’Union Européenne à hauteur d’1,8 millons d'€uros. Après 5 ans de recherches, le résultat est surprenant.
Le patient de l’expérience, Pierpaolo PETRUZZIELLO, a subit une amputation à la suite d’un accident de voiture. Quatre électrodes miniatures lui ont été implanté chirurgicalement dans le bras gauche. Une impulsion électrique est nécessaire et il lui faut un certain niveau de concentration et de silence pour parvenir à bouger les doigts de cette main artificielle. Pierpaolo est parvenu à un résultat au bout de 4 semaines d’entraînement. Avec ce prototype, composé de 4 moteurs et de 40 senseurs, il peut à nouveau ressentir la sensation du toucher ! Une avancée considérable.
Tout aussi surprenant, cette stimulation lui a permis de réutiliser des muscles dont il ne se servait plus.
Le financement des programmes est un point clef pour la recherche. C’est le cas pour SmartHand (financé par l’U.E.), comme c’est le cas aux Etats-Unis.
La DARPA (Defense Advanced Research Projects Agency), a financé 2 types de projets. Le colonel Geoffrey LING a expliqué que l’objectif était de faire progresser l’état des prothèses, mais aussi d’avoir une prothèse prête pour des essais clinique.
Le premier programme, "Revolutionizing Prosthetics 2007", a été financé à hauteur de 18,1
 millions de dollars (soit 10 fois plus que le projet SmartHand !).
millions de dollars (soit 10 fois plus que le projet SmartHand !). C’est DEKA (du nom de son fondateur Dean KAMEN) qui a reçu le financement et leur a permis de concevoir un bras robotique (the DEKA Arm, surnomé Luke), toujours en cours de développement. Leurs avancées sont impressionnantes. Le principe du fonctionnement de ce bras est basé sur une commande par les pieds. Des coussinets récepteurs reçoivent les commandes du patient et font bouger le bras et la main. Pour simplifier, c’est comme si on avait transformé une manette de jeux vidéo en coussinet pour faire bouger un bras robotique avec le pieds. On fixe l’armature à l’épaule et le tour est joué.
 Le second programme, "Revolutionizing Prosthetics 2009", a bénéficié de 34,5 millions de dollars. C’est APL (Applied Physics Laboratory) qui a pris en charge ce second projet. Le but est (je cite) de "créer des prothèses plus naturelles en apparence et en utilisation". L’aspect du bras, et l’imitation d’une peau sont donc également à l’étude. Selon Michael Mc MOUHHLIN, ils sont désormais prêts "à l’essai avec les humains pour démontrer que le système peut fonctionner avec les pensées du patient et qu’il peut lui fournir des réactions sensorielles, restaurer la sensation du toucher".
Le second programme, "Revolutionizing Prosthetics 2009", a bénéficié de 34,5 millions de dollars. C’est APL (Applied Physics Laboratory) qui a pris en charge ce second projet. Le but est (je cite) de "créer des prothèses plus naturelles en apparence et en utilisation". L’aspect du bras, et l’imitation d’une peau sont donc également à l’étude. Selon Michael Mc MOUHHLIN, ils sont désormais prêts "à l’essai avec les humains pour démontrer que le système peut fonctionner avec les pensées du patient et qu’il peut lui fournir des réactions sensorielles, restaurer la sensation du toucher". Le MPL (Modular Prosthetic Limb) dispose de 22 points de mouvement (dont les doigts) et son poids ne dépasse pas celui d’un bras
Insensibilité :
Comme je l'évoquais avec le bras MPL et le projet SmartHand, il existe déjà des avancées en matière de toucher. L'insensibilité peut être considéré comme un problème mineur quand on pense aux problèmes de connexions. Mais si la connexion fonctionne, alors le toucher pourrait être une part énorme de progrès dans le développement des prothèses.
En fait il s'agit de franchir la dernière frontière aussi bien physique que psychologique en rendant le sens du toucher aux amputés. Une chose qu'est capable de faire la Cyberhand.
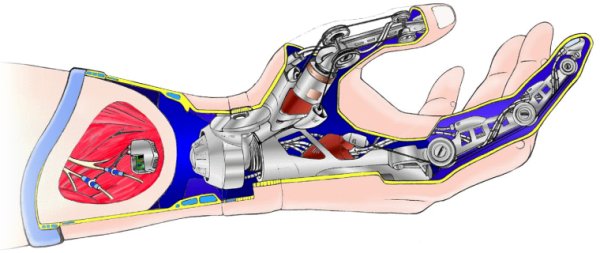
Bonne nouvelle donc, les mains artificielles finiront sans doute par être sensibles au toucher ! Le problème résidait dans le renvoi de l'information de la main au cerveau. Cette technique semble donc être au point. Reste le problème de l'encombrement et de la complexité qui pourrait être
Qu’elles soient pour un être
Fragilité :
Qu’elles soient industrielles ou sous forme de prothèses, les mains ont le défaut d’être particulièrement fragiles contrairement à ce que l’on pourrait croire.
Ce qu’il faut comprendre c’est que cette faiblesse est celle de la machine. En palliant à ce problème, la machine deviendrait plus proche, voire supérieure à l’homme.
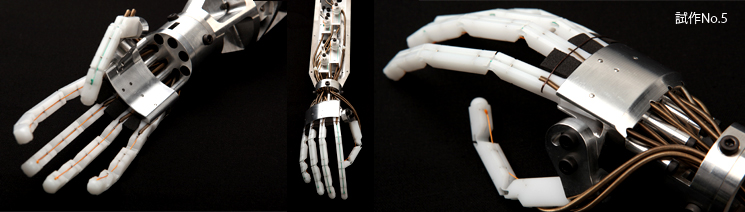
Une solution ? La main DLR-HIT 1.
Elle est capable de se prendre un bon coup de marteau sur les doigts sans casser.
Ça ne l'empêche pas pour autant d'être bourrée d'électronique et de capteurs.
Un petit exemple avec sa descendante, le modèle 2.
Voici les capteurs que l'on trouve dans un seul doigt :
•3 capteurs de position
•3 capteurs de couple mixte
•3 capteurs de position/vitesse du moteur
•1 capteur de force du doigt
•3 capteurs de température moteur
•3 capteurs pour la compensation de température
La particularité des produits DLR pose également les bases d’un autre débat, celui de la résistance et de la force.
Les prothèses seraient les « éclaireurs » d’une « armée » d’augmentations qui finiront par envahir notre quotidien (selon certains scientifiques).
Faut-il limiter la résistance et la force des prothèses, des robots… ?
Le problème ne semble pas se poser en ces termes pour le moment. Robustesse ne signifie pas invincibilité. La menace (Terminator, I Robot…) du robot trop résistant est loin d'être assez concrète pour inspirer de réelles inquiétudes.
En développant la résistance, il s’agit plutôt de rendre un produit « viable » et « pérenne » plutôt que de créer des gens équipés de bras surhumains. Cet objectif prend en compte le coût élevé des prothèses issues d'une technologie coûteuse et les années de recherches à amortir.


Si DLR vend des prothèses qui tombent en pièces le lendemain… ils ne vont pas gagnez beaucoup d’argent. De plus, dans le cas d’une prothèse, il s’agit de remplacer un membre perdu par un membre artificiel. Une quelconque fragilité est une épreuve psychologique supplémentaire à surmonter et peut rappeler le handicap.
Un bémol cependant, cette main censée être polyvalente n’a pas l’air prête pour l’adaptation aux amputés. La recherche semble s’orienter surtout pour l’usage industriel et spatial. Elle pourrait devenir un « morceau » de robot téléguidé pour effectuer des réparations dans le vide spatial.
Il n’y a donc rien de fait… peut-être plus tard, lorsque les premières mains sortiront à des coûts peu élevés, DLR entrerait en concurrence.
Coût :
Le problème des coûts est sans doute l’un des défauts les plus critiques.
Les prix des appareils disponibles (ou bientôt disponibles) ne sont pas abordables pour tout le monde ! Les coûts seront une barrière infranchissable, à moins d’entrer dans une forme de prise en charge particulière (sécurité sociale, mutuelles, assurances).
Quand on voit les problèmes rencontrés parfois pour obtenir un fauteuil roulant dans notre pays où la couverture sociale est l’une des meilleurs au monde, on peut se demander à qui vont s’adresser ces prothèses. Seul le temps, et donc le progrès, pourrait faire baisser les coûts.
Un exemple : entre 70 000 et 100 000$ pour la main DLR. Egalement 100.000$ de prévu pour le bras de DEKA.
Moins cher, le bras I-Limb coûte tout de même 18 000$ et n’a pas du tout les mêmes fonctionnalités (de plus, contrairement à d’autres bras myoélectriques, il n’est pas pris en charge par la sécurité sociale en France). A titre de comparaison un fauteuil roulant coûte de 2 700€ à 15 000€.
Le prix reste donc une barrière particulièrement délicate à franchir, surtout dans des pays où la protection sociale n’existe pas.
Ça ne donne pas envie de faire des moulinets avec un sabre laser…
Voilà ce que l’on pouvait dire sur la réalité des mains robotiques actuelles. Je ne peux pas parler de tous les développements en cours ou déjà existant car ils sont un peu trop nombreux (c’est un euphémisme). J’ai préféré mettre l’accent sur la diversité des techniques. Il existe aussi les mains passives comme les prothèses Pillet dont le seul but (déjà fort honorable) est l’esthétisme.
La main idéale serait sans doute un mélange de toutes ces techniques tout en étant à un prix abordable. Et ça, ce n'est pas gagné...








